© 2023 yanghn. All rights reserved. Powered by Obsidian
3.6 softmax 回归的从零开始实现
要点
- 和线性回归不同,softmax 回归本质还是分类问题,虽然是利用分布将分类问题连续化,方便求导,但分类准确率评价是必不可少的
1. 初始化模型参数
原始数据集中的每个样本都是 28×28 的图像,输出图像类别有 10 个。本节将展平每个图像,把它们看作长度为 784 的向量。网络只有一层 3.4 softmax 回归#^5f0967,输入的是 784 维,输出 10 维,也就是说:
- 样本矩阵
: 6000×784 的矩阵 - 参数矩阵
: 784×10 的矩阵 - 偏置
: 是1×10 的矩阵 - 输出
: 6000×10 的矩阵
import torch
from IPython import display
from d2l import torch as d2l
batch_size = 256
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size) # 迭代器的批量大小为256。
num_inputs = 784
num_outputs = 10
W = torch.normal(0, 0.01, size=(num_inputs, num_outputs), requires_grad=True)
b = torch.zeros(num_outputs, requires_grad=True)
2. 定义 softmax 函数
softmax 函数定义如下:
def softmax(X):
X_exp = torch.exp(X)
partition = X_exp.sum(1, keepdim=True)
return X_exp / partition # 这里应用了广播机制
是对输出 axis=1 Pandas 拾遗#^4f157c
注意
这里 keepdim=True 必须要写,不然 sum 完后维度会降低 Pandas 拾遗#^6eab38, X_exp (6000,10) 和 partition(6000,) 是无法广播的 2.1 数据操作#^867ccf,得保持 partition(6000,1), 所以每次用 sum 要注意维数问题
3. 定义模型
用 reshape 将每张原始图像展平为向量
def net(X):
return softmax(torch.matmul(X.reshape((-1, W.shape[0])), W) + b)
4. 损失函数:交叉熵损失
实际标签 y 本身就是一个类别,由交叉熵计算方式,可以用高级索引 Numpy 高级索引(Advanced indexing)#^9d3fd4 在预测矩阵
def cross_entropy(y_hat, y):
"""输出一行交叉熵损失矩阵"""
return - torch.log(y_hat[range(len(y_hat)), y])
cross_entropy(y_hat, y)
5. 评估分类精度
def accuracy(y_hat, y): #@save
"""计算预测正确的数量"""
if len(y_hat.shape) > 1 and y_hat.shape[1] > 1:
y_hat = y_hat.argmax(axis=1)
cmp = y_hat.type(y.dtype) == y
return float(cmp.type(y.dtype).sum())
accuracy(y_hat, y) / len(y) # 分类准确率
下面定义一个实用程序类 Accumulator,用于对多个变量进行累加。在上面的 evaluate_accuracy 函数中,我们在 Accumulator 实例中创建了2个变量,分别用于存储正确预测的数量和预测的总数量。当我们遍历数据集时,两者都将随着时间的推移而累加。
def evaluate_accuracy(net, data_iter): #@save
"""计算在指定数据集上模型的精度"""
if isinstance(net, torch.nn.Module):
net.eval() # 将模型设置为评估模式
metric = Accumulator(2) # 正确预测数、预测总数
with torch.no_grad():
for X, y in data_iter: # 不断叠加计算精度
metric.add(accuracy(net(X), y), y.numel())
return metric[0] / metric[1]
class Accumulator: #@save
"""在n个变量上累加"""
def __init__(self, n):
self.data = [0.0] * n
def add(self, *args):
self.data = [a + float(b) for a, b in zip(self.data, args)]
def reset(self):
self.data = [0.0] * len(self.data)
def __getitem__(self, idx):
return self.data[idx]
6. 训练
和线性回归的训练是一样的 3.2 线性回归从零开始实现#^9bc9cb,这里加一些判断更加通用:
6.1 一 个 epoch 的训练
def train_epoch_ch3(net, train_iter, loss, updater): #@save
"""训练模型一个迭代周期(定义见第3章)"""
# 将模型设置为训练模式
if isinstance(net, torch.nn.Module):
net.train()
# 训练损失总和、训练准确度总和、样本数
metric = Accumulator(3)
for X, y in train_iter:
# 计算梯度并更新参数
y_hat = net(X)
l = loss(y_hat, y)
if isinstance(updater, torch.optim.Optimizer):
# 使用PyTorch内置的优化器和损失函数
updater.zero_grad() # torch 的 SGD 学习器不会除以 batch_size
l.mean().backward()
updater.step()
else:
# 使用定制的优化器和损失函数
l.sum().backward()
updater(X.shape[0]) # 课程内置的 SGD 会除以 batch_size
metric.add(float(l.sum()), accuracy(y_hat, y), y.numel())
# 返回训练损失和训练精度
return metric[0] / metric[2], metric[1] / metric[2]
6.2 动画展示
展示训练函数的实现之前,我们定义一个在动画中绘制数据的实用程序类Animator, 它能够简化本书其余部分的代码。
class Animator: #@save
"""在动画中绘制数据"""
def __init__(self, xlabel=None, ylabel=None, legend=None, xlim=None,
ylim=None, xscale='linear', yscale='linear',
fmts=('-', 'm--', 'g-.', 'r:'), nrows=1, ncols=1,
figsize=(3.5, 2.5)):
# 增量地绘制多条线
if legend is None:
legend = []
d2l.use_svg_display()
self.fig, self.axes = d2l.plt.subplots(nrows, ncols, figsize=figsize)
if nrows * ncols == 1:
self.axes = [self.axes, ]
# 使用lambda函数捕获参数
self.config_axes = lambda: d2l.set_axes(
self.axes[0], xlabel, ylabel, xlim, ylim, xscale, yscale, legend)
self.X, self.Y, self.fmts = None, None, fmts
def add(self, x, y):
# 向图表中添加多个数据点
if not hasattr(y, "__len__"):
y = [y]
n = len(y)
if not hasattr(x, "__len__"):
x = [x] * n
if not self.X:
self.X = [[] for _ in range(n)]
if not self.Y:
self.Y = [[] for _ in range(n)]
for i, (a, b) in enumerate(zip(x, y)):
if a is not None and b is not None:
self.X[i].append(a)
self.Y[i].append(b)
self.axes[0].cla()
for x, y, fmt in zip(self.X, self.Y, self.fmts):
self.axes[0].plot(x, y, fmt)
self.config_axes()
display.display(self.fig)
display.clear_output(wait=True)
6.3 三次 epoch 的训练
def train_ch3(net, train_iter, test_iter, loss, num_epochs, updater): #@save
"""训练模型(定义见第3章)"""
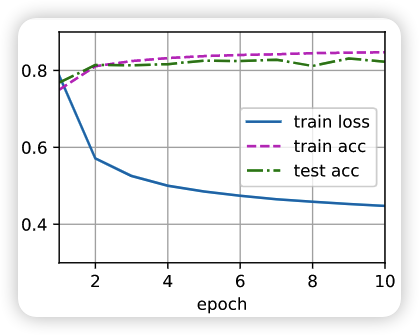
animator = Animator(xlabel='epoch', xlim=[1, num_epochs], ylim=[0.3, 0.9],
legend=['train loss', 'train acc', 'test acc'])
for epoch in range(num_epochs):
train_metrics = train_epoch_ch3(net, train_iter, loss, updater)
test_acc = evaluate_accuracy(net, test_iter)
animator.add(epoch + 1, train_metrics + (test_acc,))
train_loss, train_acc = train_metrics
assert train_loss < 0.5, train_loss
assert train_acc <= 1 and train_acc > 0.7, train_acc
assert test_acc <= 1 and test_acc > 0.7, test_acc
- 断言语法见 Python 的 assert(断言)
- 在每个迭代周期结束时,利用
test_iter访问到的测试数据集对模型进行评估。
lr = 0.1
def updater(batch_size):
return d2l.sgd([W, b], lr, batch_size)
num_epochs = 10
train_ch3(net, train_iter, test_iter, cross_entropy, num_epochs, updater)
训练结果: